

Description
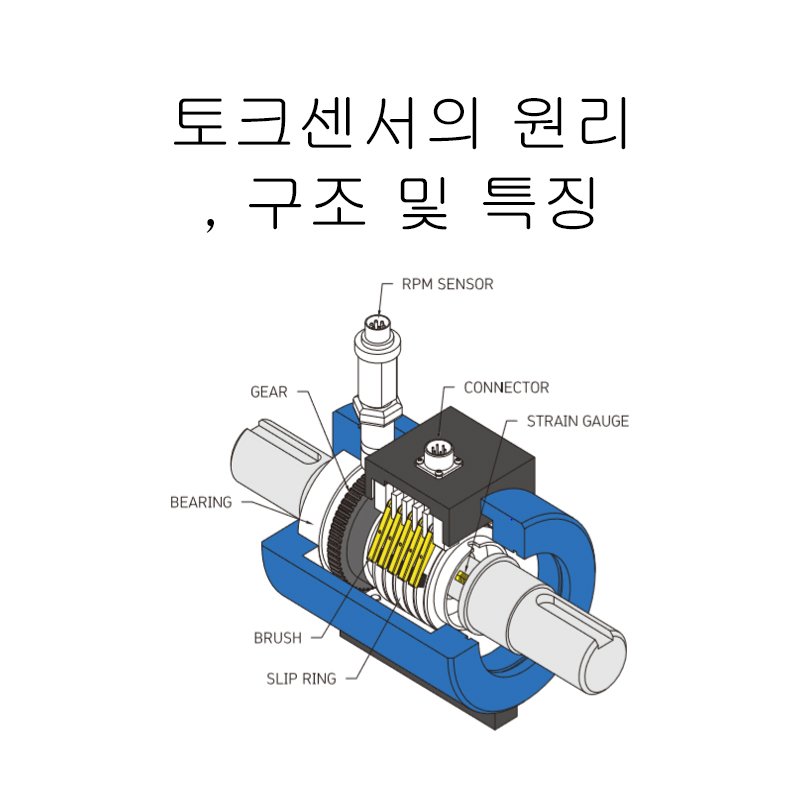
접촉식 토크센서의 구조
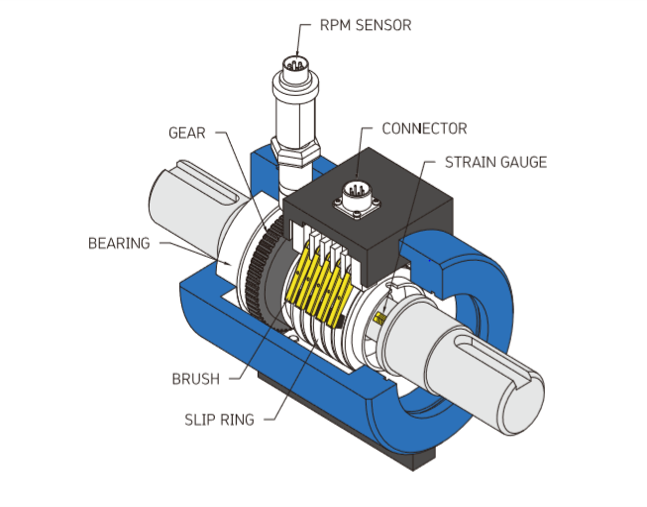
▶ 현장에서 가장 많이 사용
▶ 회전축에 가해지는 뒤틀림(TORQUE)을 스트레인게이지를
통해서 검출하는 센서
▶ S/G가 취득한 토크데이터를 슬립링 & 브러쉬를 통해서
신호전달
▶ 작업조건에 따라 장시간사용시 슬립링&브러쉬의 마찰 부위
접촉저항이 생겨 데이터가 왜곡되는 단점
▶전자 노이즈가 쉽게 발생하는 여러 속도의 전기기계에서 효율적
▶ 4000rpm 이상의 조건에서는 사용일 불가 하다.
비접촉식 토크센서의 구조
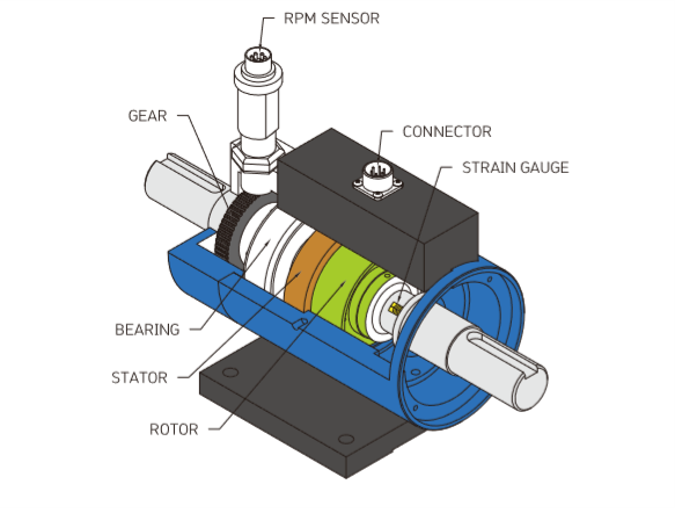
▶ 회전축에서 취득한 토크데이터를 RF무선방식 또는
적외선 통신, 자기유도방식등 비접촉으로 신호전달
▶ 장시간 사용에도 신호 왜곡으로 인한 청소 나 A/S가 필요
없음. 손쉬운 장착이 가능
▶ 10,000 rpm 까지의 고회전에도 사용이 가능하다.
▶ 접촉식에 비해 고가이다.
▶ 자동 보정 및 추가 조정이 불필요
▶ 에너지 소모가 적음
▶ 토크 및 각도 위치 측정, 샤프트가 회전시 스트레인게이지가
금속에 가해지는 비틀림을 측정
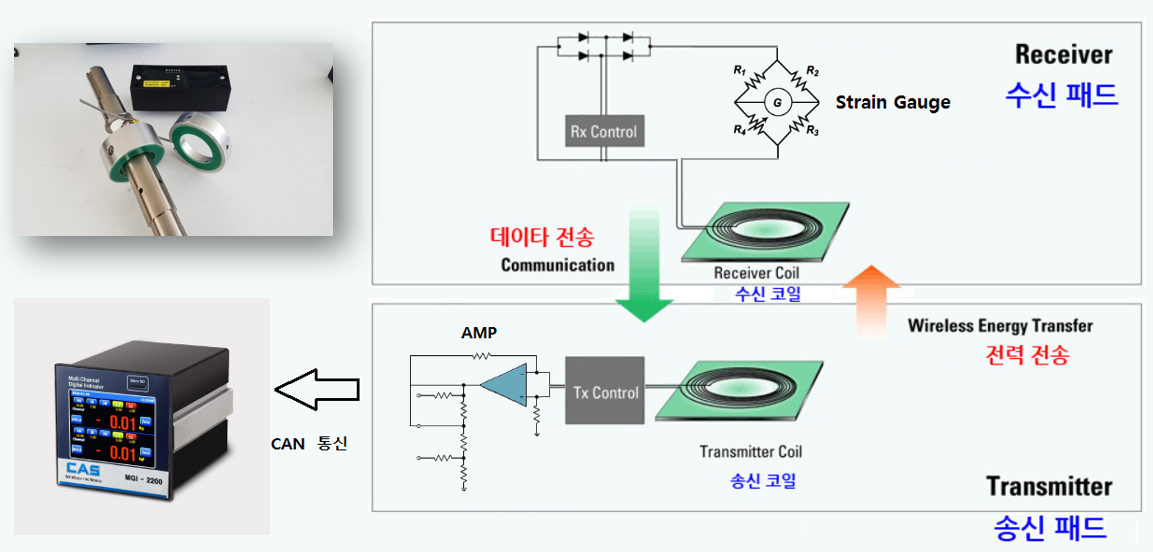
비접촉식 토크센서의 원리
커플링 형식
▶ Single-Flex Coupling은 편각 오차만 수용하는데 이것은 힌지(Hinge)나 피봇(Pivot)과 같은 역할을 하는 것으로서, 편심 오차는 수용하지 못합니다.
▶ Double-Flex Coupling은 편각 및 편심오차 모두를 수용하며, 이것은 피봇 사이에 어느 정도의 거리가 유지되어 있거나 짧은 스페이서(Spacer)가 부착된 2개의 Single-Flex Coupling으로 생각할 수 있습니다.
Single-Flex Coupling과 Double-Flex Coupling은 모두 엔드 플로트의 수용 가능 여부가 설계에 따라 결정됩니다.
▶ Rigid Coupling은 그 이름이 나타내는 바와 같이, 샤프트에 장착된 한 세트의 플랜지(Flange)에 지나지 않음으로 어떠한 형식이 오차도 보상하거나 허용하지 않습니다.




Reviews
There are no reviews yet.